From February 2021, XJCSENSOR successively released new types of multi-axis force sensor to help the development of industry 4.0 for automated intelligent manufacturing. Industry 4.0 is to realize the intelligent automation of natural resources from development, collection, and production into the circulation process. Among them, the smart factory is the carrier of smart manufacturing, and the control system, as an important part of achieving smart manufacturing, cannot do without the support of the force control system.
So how does the execution and control of the force control system be made intelligently to help the development of Industry 4.0?
Let us understand the principles and applications of multi-axis force sensors:
Multi-axis sensor
Multi-axis Sensor is a component that is fitted onto the wrist of robot to detect forces and torques that are applied to the tool. Since it is between the robot and the tool, it can read the force situation during operation of tool.
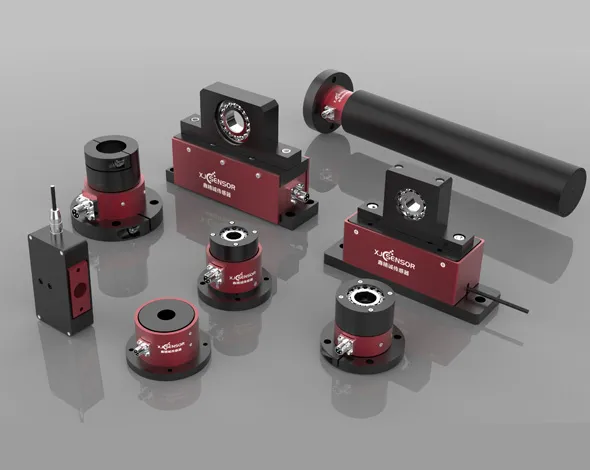
XJCSENSOR multi-axis force products can be divided into two-axis force, three-axis force, four-axis force, and five-axis force according to the number of measuring axes.
According to the decoupling method, it can also be divided into structure decoupling structure and matrix decoupling structure.
Using the principle of resistance strain type, it has the advantages of high accuracy, high signal-to-noise ratio, good high and low temperature characteristics, high rigidity, strong stability, and diversified size customization. Sensor internal has a mechanical anti overload design, strong anti-overload capability, and can be integrated Amplifier, the output signal has many forms for selection.
Through a special decoupling method design, small crosstalk error, especially the small long-term crosstalk .
Multi-axis sensor application
The casing part of the sensor is attached to the robot wrist. And the moving part is attached to the tool side. When a force is applied on the tool, the sensor reads the distance that the moving part has moved from the casing, depending on the amplitude of the displacement, the sensor returns a force signal to the computer.
An application that we are seeing often with the sensor is the bench test application. A robot is paired with a sensor and a gripper and is performing some cyclic action on a product. Where the sensor gets involved is when a given amount of force has to be applied on a device. The robot can apply a limited force that has been set by the programmer and it can also monitor this force. This means the product is tested at a given force and the force is monitored to see if there is any change in the behavior of the product.
XJCSENSOR 6 axis sensor principle
XJCSENSOR six-axis force sensor adopts the principle of resistance strain type, which has the advantages of large torsional stiffness, fast response speed, high precision, good high and low temperature characteristics, high signal to-noise ratio, high rigidity, strong stability, and diversified size customization.
The sensor inside with a mechanical anti-overload design, which has strong anti-overload capability. It can be built in with an integrated amplifier. The output signal has a variety forms for selection.
Through a special decoupling method design, the crosstalk error of the sensor is very small, especially with small long-term crosstalk error.

XJCSENSOR 6 axis sensor structures
XJCSENSOR six-axis force sensor is divided into two structures according to the decoupling method: structure decoupling and matrix decoupling structure.
Structure decoupling structure: The six-axis force sensor with structure decoupling structure has only 6 channel outputs, which are three forces (FX, FY, FZ) and three torques (MX, MY, MZ), and each channel is independent, when one of the channels is loaded, only this channel has signal output, and the other channels will not have signal output. For example, the XJC-6F series are all six axis force sensors with decoupling structure.
Matrix decoupling structure: The six-axis force sensor with matrix decoupling structure generally has 6~12 channel outputs, and each output signal is coupled with each other, when one of the channels is loaded, the other channels will have signal output, and the sensor needs to collect signals The three forces (FX, FY, FZ) and three torques (MX, MY, MZ) can be obtained by the box decoupling matrix operation. For example, the XJC-6FM series are all matrix decoupling six-axis force sensors.

XJCSENSOR 6 axis sensor choose guidance
Choosing a suitable sensor is very important. If you need any selection guidance, pls provide the following

1. Application environment:
Information about whether it is in contact with corrosive gas or liquid; indoor or outdoor use; operating temperature; waterproof level requirements; strong magnetism or strong interference environment, ect.
2. Dimensions and installation methods.
This catalog only gives the size and structure of several conventional products. If the structure and size in this catalog doesn’t meet the requirements, please provide the corresponding size and installation method. We can customize it as required. Fast and high-quality non-standard customized service is one of our biggest advantages.
3. The actual measurement range of sensor
In order to make the sensor maintain long-term reliable stability, we recommend that the maximum measuring force and torque do not exceed 80% of the sensor capacity.
4. Measurement accuracy requirements
The nonlinearity error of our conventional six-axis force sensor single channel is within 0.5% F.S, the repeatability error is within 0. 1% F.S, and the crosstalk error is within 3%. High-precision sensors are also available.
5. Electrical interface requirements
Our six-axis force sensor has a wealth of analog or digital output modes for selection. Analog output: mV, V, mA; Digital output: EtherCAT, Ethernet, RS232 or CAN bus, etc.;
If the above signals cannot meet your requirements, XJCSENSOR can also customize other output signal methods.